If you find this research helpful, please cite (volume, number, pages coming soon)
@ARTICLE{VIUNet,
author={Kao, Peng-Yuan and Chang, Hsui-Jui and Tseng, Kuan-Wei and Chen, Timothy and Luo, He-Lin and Hung, Yi-Ping},
journal={IEEE Access},
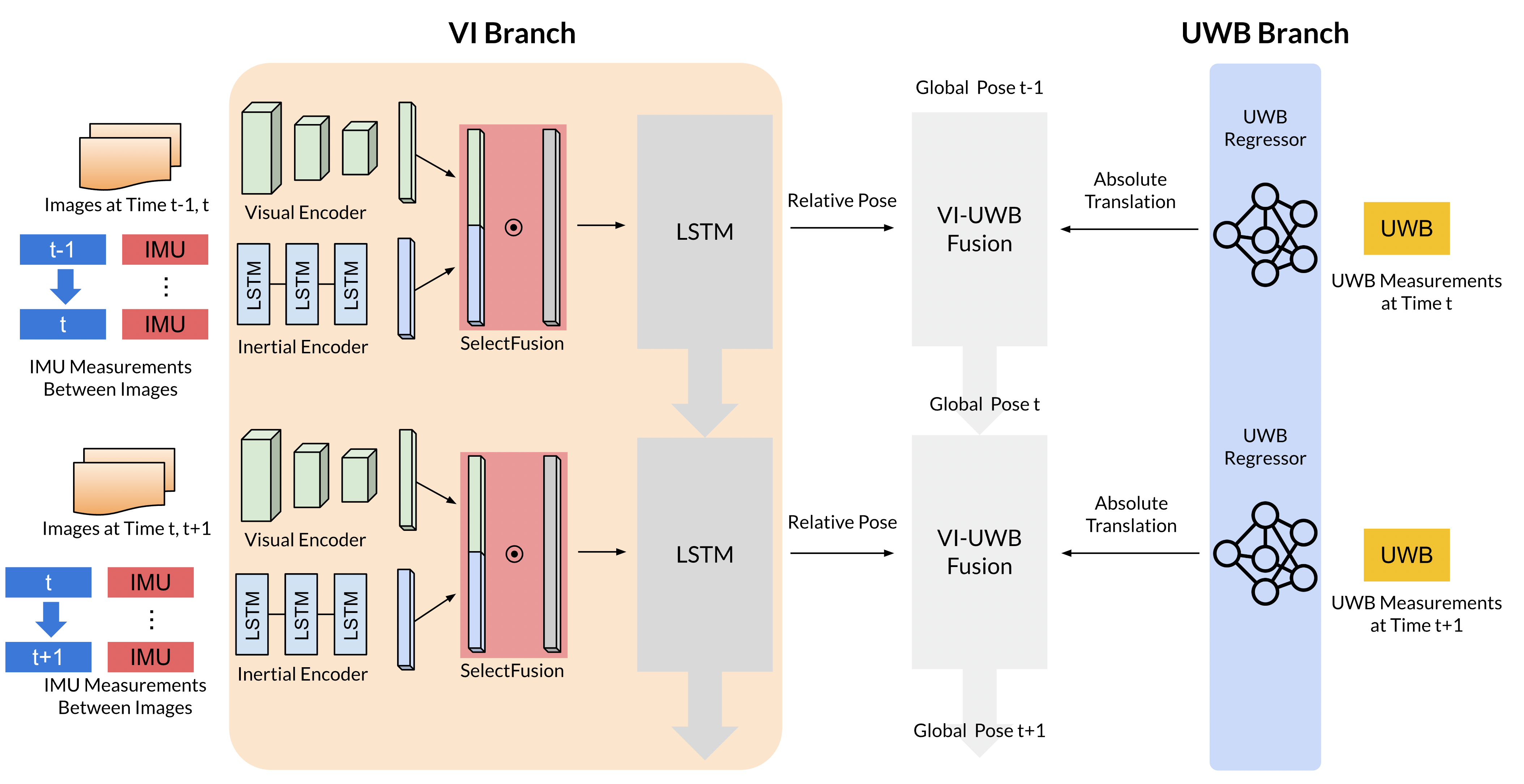
title={VIUNet: Deep Visual–Inertial–UWB Fusion for Indoor UAV Localization},
year={2023},
volume={},
number={},
pages={},
doi={10.1109/ACCESS.2023.3279292}}